



1月は衝突回避自動車でした。
白色に近づいたときの赤外線フォト
レフレクターの値を調べておいて、
その値に近づくと右にまがったり、
左にまがったりするように
プログラミングします。
そうすると、白い壁にぶつかるのをさける
ことができます。Dくんは壁に近づいたら
きちんと90度にまがるようにプログラミング
できました!
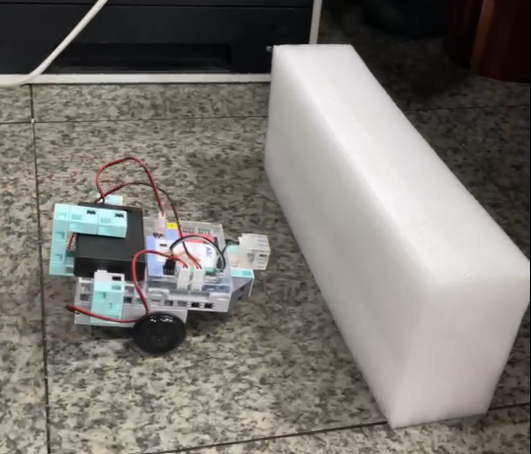
衝突回避自動車
2月はライントレース自動車でした。
今度は、赤外線フォトレフレクターの値を
白色のときと黒色のときと両方調べます。
右モーターと左モーターの速度を変えると、
車は回転します。黒の数値をはずれたら、
左右の速度を逆にして、黒の数値に戻ったら
また左右の数値をもとに戻します。
そうすると黒のラインにそってずっと
走ります。
さらにもう1つ赤外線フォトレフレクターを
つけて停止線で一旦停止するようにしました。
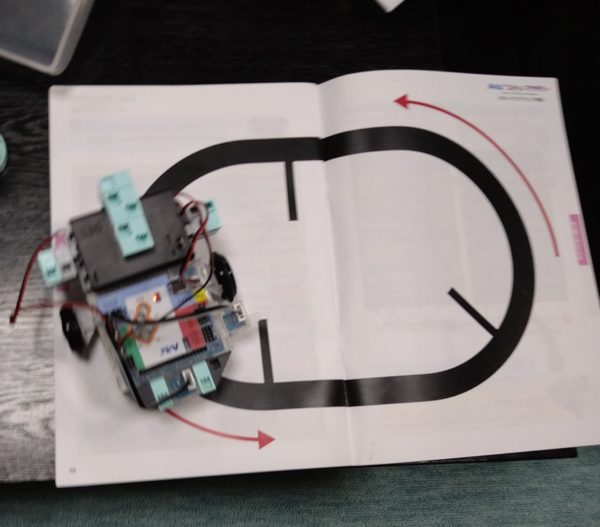
ライントレース自動車
決められたコースの後は自由にコースを書いて
走らせました。
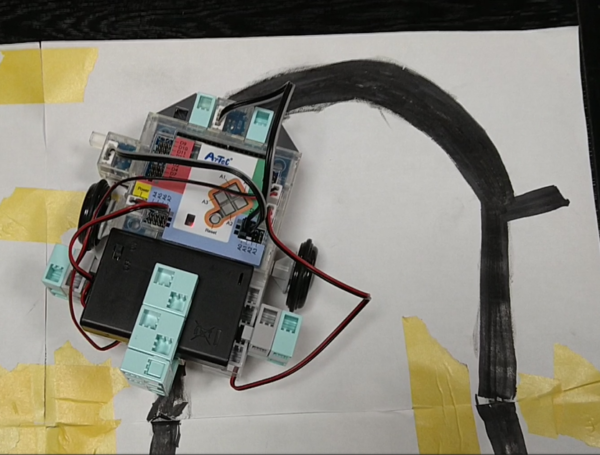
自由なコース
レベルアップミッションでは、赤外線フォト
レフレクターを横につけて、白い壁にそって
走るようにしました。
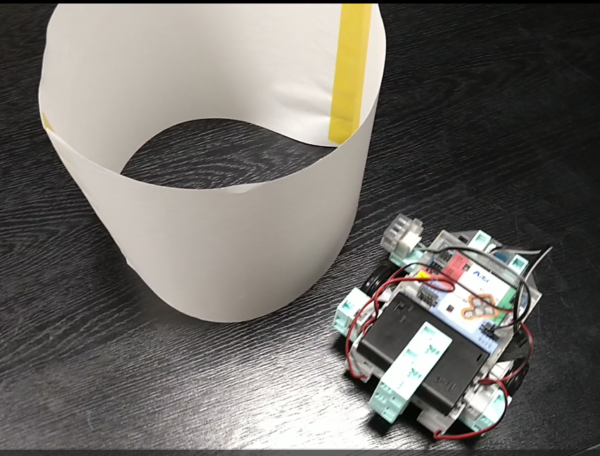
Dくん、うまくプログラミングできました!
動画です。